



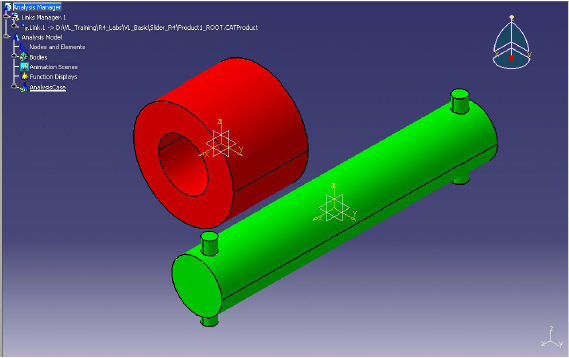
机构是由多个构件组成,各个构件之间通过运动副连接起来。各个构件之间按照运动关系进行装配,施加驱动以及力的边界条件,对该机构进行动力学求解。通过求解可以得到各个构件的位置、速度、加速度以及构件上的受力。在这个实例中,机构由两个构件组成。通过在滑动体和大地之间建立一个运动副,再在机构上定义一个驱动,求解后可以察看整个机构的运动情况。机构组成如下图所示,红色的套筒代表与大地固定的体,绿色的圆柱代表滑动体。

一、 启动Virtual.lab motion模块
在桌面上双击你的Virtual.Lab图标,选择File Open,找到你保存模型文件的位置,出现如下界面。
二、 定义圆柱运动副
在定义一个多体运动模型时,有许多可选单元。每个单元都有相关的图标快捷方式,在机构设计平台上都可一一找到。选择哪个单元,相应的按钮就会变亮。在Virtual.lab motion中定义一个圆柱副需要选择两根轴,定义的旋转轴都属于相应的体,通过圆柱副相连的两个体能沿轴相互滑动和转动。
1、在特征树上双击Analysis Model激活机构设计平台。
2、点击固定副(Bracket Joint) 右下角的下拉箭头,在下拉出的运动副库中选择圆柱副(Cylindrical Joint) ,弹出如下所示的圆柱运动副定义对话框。

对话框说明要完成圆柱副的定义,需要选择两个体,每个体用一根轴代替。在选轴之前我们看到每个选框里都是No Selection,一旦选择了体,选框会有对应的显示。
3、将鼠标指向代表与大地固连的红色套筒,当鼠标移到几何体附近时就会出现一根轴,如下所示当套筒的中心轴高亮度显示时就按下鼠标键选定。
马上可以看到在圆柱副定义对话框的Body1后面的轴选框就变了。
4、将鼠标指向代表滑动体的绿色实体附近,等中心轴高亮度显示后按下鼠标键选定,看到在圆柱副定义对话框的Body2后面的轴选框也变了。
选择OK关闭轴运动副定义对话框,两个构件同时也装配到了一起。
三、 在圆柱副上施加一个运动副驱动
在圆柱副上施加的运动副驱动,定义这两个用圆柱副装配起来的体的相互之间的轴向运动和绕轴的转动。
1、点击Create Difference Constraint 右下角的箭头,在下拉出的约束库中选择Create Joint Driver 图标,弹出如下对话框。

2、在Joint后面的选框里选择Cylindrical Joint,在TYPE后面的选框里选择REL.TRANS。
3、在Function后面的选框里点击右键,在下拉菜单中选择New,弹出如下所示的TimeLength Function定义对话框。在Function Type选框选择HARMONIC。这时在详细的模型子结构中Analysis Model→Data下出现一个新的分支TimeLength Function.1。
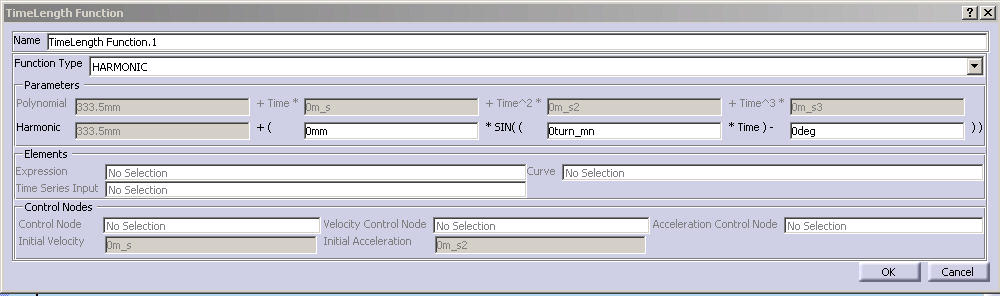
4、为完成这个函数,需要确定四个参数,其中第一个是系统默认的,它代表两个通过圆柱运动副连接的体在连接点的初始偏移量。第二个参数填20mm,代表这两个体在轴向有20mm的振动位移,第三个参数填45turn_mn,代表转速。点击OK关闭TimeAngle Function对话框,再点击OK关闭Joint Driver Definition对话框。
四、 求解
1、双击Analysis Model → AnalysisCase.1下的Solution Set,弹出Solution Set对话框,对各求解参数进行设置。点击OK关闭Solution Set对话框。
2、选择Compute Solution 按钮进行求解。
五、 结果仿真
在Analysis Model → AnalysisCase.1下面选择Solution Set,
点击Animate 按钮,弹出仿真对话框。点击Parameters 按钮,在采样步长Sampling Step填0.05s,关闭player
parameters设置对话框,点击Play Forward 按钮。通过仿真我们可以看到滑动体将沿轴向与套筒(代表大地)发生相对位移。
六、 在圆柱副上重新施加一个运动副驱动
1、在Analysis Model → Constraints下双击Joint Driver.1,弹出Joint Driver对话框,在TYPE选框选择REL.ANGLE.
2、在Function后面的选框里点击右键,在下拉菜单中选择New,弹出TimeAngle Function定义对话框,在Function Type选框选择HARMONIC.这时在详细的模型子结构中Analysis Model → Data下出现一个新的分支TimeAngle Function.1。
3、和上面施加第一个运动副驱动一样,函数的第一个参数为系统默认,第二个参数填20deg,第三个参数填45turn_mn.
4、点击OK关闭TimeAngle Function对话框,再点击OK关闭Joint Driver Definition对话框。
七、 插入一个新的分析
从主菜单选择Insert → New Analysis Case,点击OK关闭Analysis Case对话框,这时在Analysis Model下应出现一个新的分支AnalysisCase.2。
八、 运行新的分析
双击Analysis Model → AnalysisCase.1下的Solution Set,弹出
Solution Set对话框,可以对各求解参数进行设置。点击OK关闭Solution Set对话框。选择Compute Solution 按钮进行求解。
九、 仿真新的分析结果
在Analysis Model → AnalysisCase.1下面选择Solution Set,点击Animate 按钮,弹出仿真对话框。点击Parameters 按钮,在采样步长Sampling Step填0.05s。关闭player parameters设置对话框,点击Play Forward 按钮仿真模型。
十、 分析结果后处理
从机构设计平台中点击运动曲线绘制 按钮,会弹出如下所示的曲线绘制窗口。
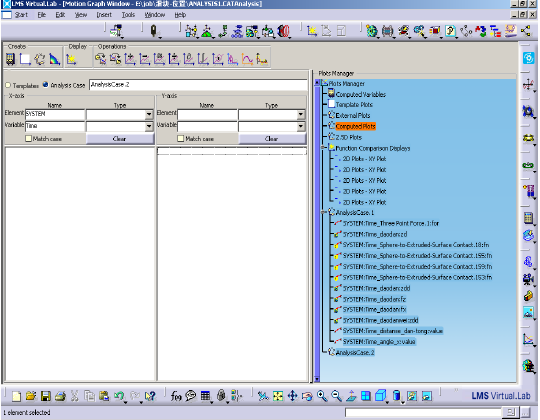
在左上角Analysis Case后面选择AnalysisCase.2,在曲线图绘制中,X轴系统自动设为仿真时间,Y轴自己选择所需结果。在这里Element后的Type项下拉选择Body,Viriable后的Type项下拉选择Length,在下面就过滤出分析中的可选项。选择part2(2.1):z,就能在曲线图的Y轴上绘出滑动体slider在全球坐标中z方向(轴向)的任一时刻的位置。
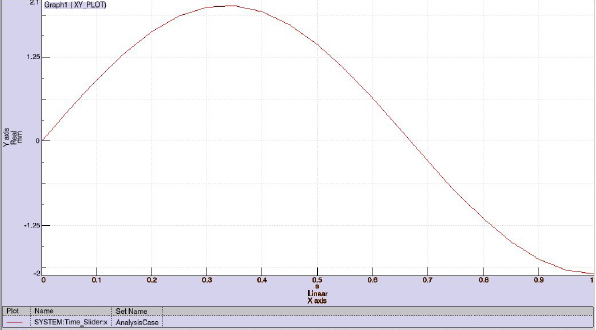
完成曲线绘制的设置后,点击曲线创建按钮 ,在右边的plots manager中我们就可以看到出现了一个新的分支。点击新曲线展示按钮 ,在弹出的New Function Display对话框中选择2D Plots,点击Finish。在弹出的窗口中右击选择Select Data,弹出Select Data窗口,选择***AnalysisCase*** → SYSTEM:Time_Slider:x option,出现如下所示的曲线图,代表滑动体slider在全球坐标中z方向(轴向)的任一时刻的位置。
保存模型。


 苏公网安备 32059002002276号
苏公网安备 32059002002276号