PQArt(原RobotArt)是中国人自主研发的工业机器人离线编程软件,始于2013年,经过多年的研发与应用,PQArt掌握了多项核心技术,包括3D平台、几何拓扑、特征驱动、自适应求解算法、开放后置、碰撞检测、代码仿真等。它的功能覆盖了机器人集成应用完整的生命周期,包括方案设计、设备选型、集成调试及产品改型,累计已有3万多人使用PQArt进行学习或工作。
解决方案
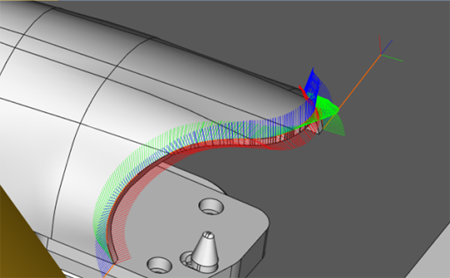
激光熔覆需要激光器沿着工件表面运动,因此往往轨迹相当复杂。激光的高能量密度使机器人能以较快的速度工作,因此对轨迹的平滑度要求也很高。PQArt能够根据模型数据自动计算出海量数据轨迹。
打磨工艺要求生成轨迹快,而且根据实际打磨的效果还要多次进行修改。PQArt利用独有的参数化轨迹设计专利技术,将您对轨迹的每一步修改都参数化处理,当修改结果不满意的时候,可以回退到任意一步并修改其参数,后续步骤自动计算,让轨迹的修改和迭代效率大大提升。
焊接是机器人主要的应用场景,PQArt的丰富轨迹生成和修改方式,让您即使在最低配的机器人控制器(只有基本的动作指令)上实现摆焊、点焊、随动送料等高级焊接效果,如果您的控制器没有外部轴联动模块,也能利用PQArt轻松实现联动焊接的效果。
在喷涂工艺中,PQArt能够快速生成/修改轨迹,同时因为独有的自定义后置和工艺设置功能,使得喷涂工艺指令能够与机器人轨迹有机结合,快速处理挂漆不均,喷涂死角等工艺问题。
不论是激光、铣削、水刀,在进行切割轨迹规划的时候难免会遇到恼人的复杂模型问题,出入刀,复杂曲面,模型不准需要二次校正等,PQArt准备了各种贴心功能为您的切割工艺保驾护航。
在产品组装过程中,机器人的连续轨迹并不复杂,但是繁多的步骤和严格的质检要求让机器人程序频繁的与周边设备进行信号交互,PQArt事件驱动型编程让您轻松应对各种信号的各种意外情况。更重要的是,当组装线里需要更换一台其他品牌的机器人是,如果您当时用的是PQArt进行编程,您只需要一键替换机器人,就能为新机器人生成与原来机器人同等效能的程序,不用再重新编程了。
- 1.激光熔覆/清洗/除锈
- 2.打磨/抛光
- 3.焊接
- 4.喷涂
- 5.切割
- 6.组装
功能优势
轨迹生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适合您!

可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设计和轨迹规划更加真实高效。
外部工具
手持零件,工具固定成为外部工具,变成更复杂。PQArt提供了外部工具、变位工具、连续TCP、工件坐标系等配合使用,使手持零件不再复杂。
碰撞检测
仿真时,开启碰撞检测功能,可以模拟检测出机器人在运动时和周边的零部件、设施的碰撞情况,并通过高亮线和输出碰撞信息加以提示。

轨迹优化处理
可把轨迹中的奇异点、轴限位、不可达、碰撞等信息反映在界面上,通过鼠标拖动自动避让,快速获得理想轨迹,提高工作效率。
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改每个机器人之间的目标位置控制点。



 苏公网安备 32059002002276号
苏公网安备 32059002002276号