



1、加载资源:打开Delmia软件切换到MSD模块,使用插入产品和插入资源命令分别将点焊产品保险杠和系统资源(提前在装配设计模块创建好的系统三维模型布局)加载进来,然后点击保存按钮仿真项目将被保存为CATProcess仿真流程文件;
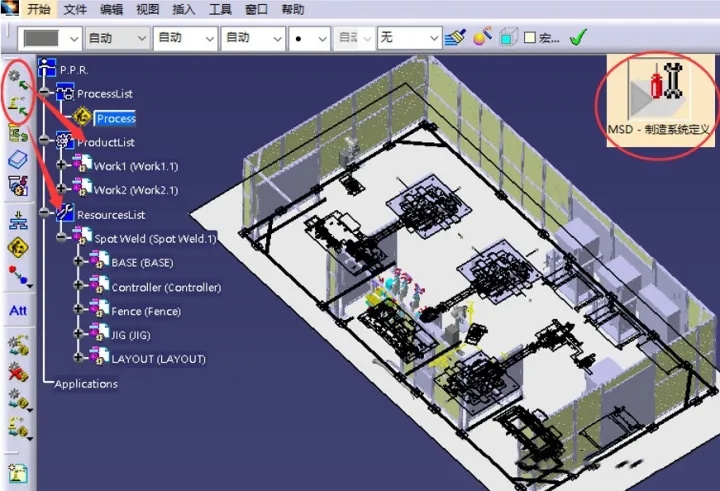
2、创建资源节点:选中项目总资源节点Spot Weld,然后在工具条中选择在PPR中创建资源命令,弹出添加资源命令输入资源节点名称,类型选择资源Resource,新建机器人和焊钳资源节点,资源的类型依据项目实际情况自行创建,有多种类型可供选择。当然也可以直接加载一个空白的总资源节点,然后其他所有资源节点如BASE、JIG、Fence等以上述方式进行创建,

3、从资源库加载机器人和焊钳:从工具条中打开目录浏览器对话框,从自建资源库和软件自带机器人库中加载一把C型焊钳,三台发那科R2000ic-165F机器人到项目中,选定焊钳和机器人后在3D视图窗口中任意位置单击鼠标左键进行放置。

4、将机器人和焊钳调整到相应的资源节点下面:在创作系统工具条中选择第一个命令调整资源的父级,打开重新调整资源父级对话框,然后依次选择C型焊钳和焊钳资源节点,将刚加载进来的C型焊钳调整到焊钳资源节点下面,同理将三台机器人全部调整到机器人资源节点下面,注意看资源节点在调整前后图标的变化,

5、资源位置调整:将软件切换到资源布置模块,在工具栏中选择资源位置捕捉移动命令,然后在资源树中选择机器人1,弹出定义参考平面对话框同时机器人模型上出现一个绿色坐标系,点击确定按钮,然后选择机器人底座再次弹出定义参考平面对话框,将参考坐标系放置到底座安装面中心位置,注意坐标系的方向(参考机器人模型上的坐标系方向进行调整),完成后点击确定按钮弹出捕捉选项对话框,选中附加将机器人作为底座的子级,若底座位置移动则机器人随之一起移动,同理将其他两台机器人安装到机器人底座;

6、将产品安装到夹具:操作步骤同上,在工具栏中选择资源位置捕捉移动命令,首先在资源树上选择产品,弹出定义参考平面对话框点击确定按钮,然后在资源树上选择夹具OP20,弹出弹出定义参考平面对话框点击确定按钮,弹出捕捉选项对话框,附加选项可选可不选,依据实际情况而定,若是有变位机则产品必须附加到夹具上才能和夹具一起转动,最后点击确定按钮产品将被安装到夹具上面;

7、焊点数据加载:焊点数据的提取、导入、投影、关联到产品,具体参考上节内容


 苏公网安备 32059002002276号
苏公网安备 32059002002276号