伏图(Simdroid)通用多物理场仿真PaaS平台和INTESIM-MultiSim有什么区别
软服之家基于其丰富和专业的的软件数据库,为您提供多个软件在基础信息、功能配置、参考价格、软件界面、特色优势、典型客户、供应商等方面的对比,帮助您选择合适的软件。
本次参与对比的软件包括: 伏图(Simdroid)通用多物理场仿真PaaS平台
、 INTESIM-MultiSim
|
|
||||
|---|---|---|---|---|
|
||||
| 功能分类 | CFD流体动力学仿真分析 多体动力学仿真 多物理场仿真/多学科仿真 热分析 电磁仿真分析 | CFD流体动力学仿真分析 多物理场仿真/多学科仿真 | - | - |
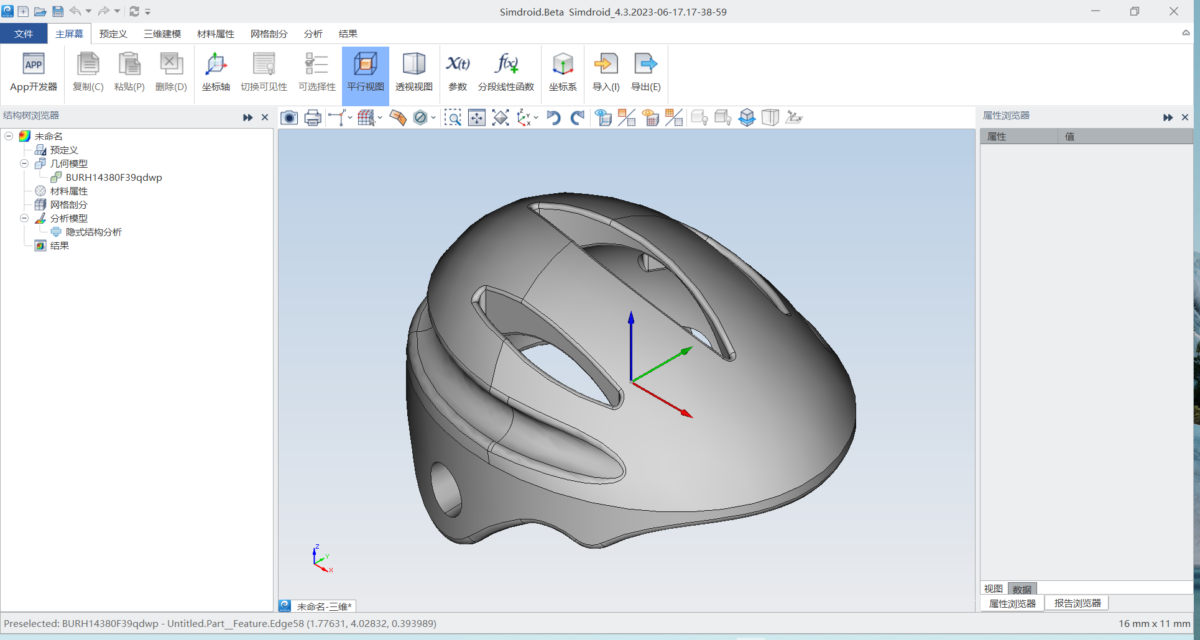
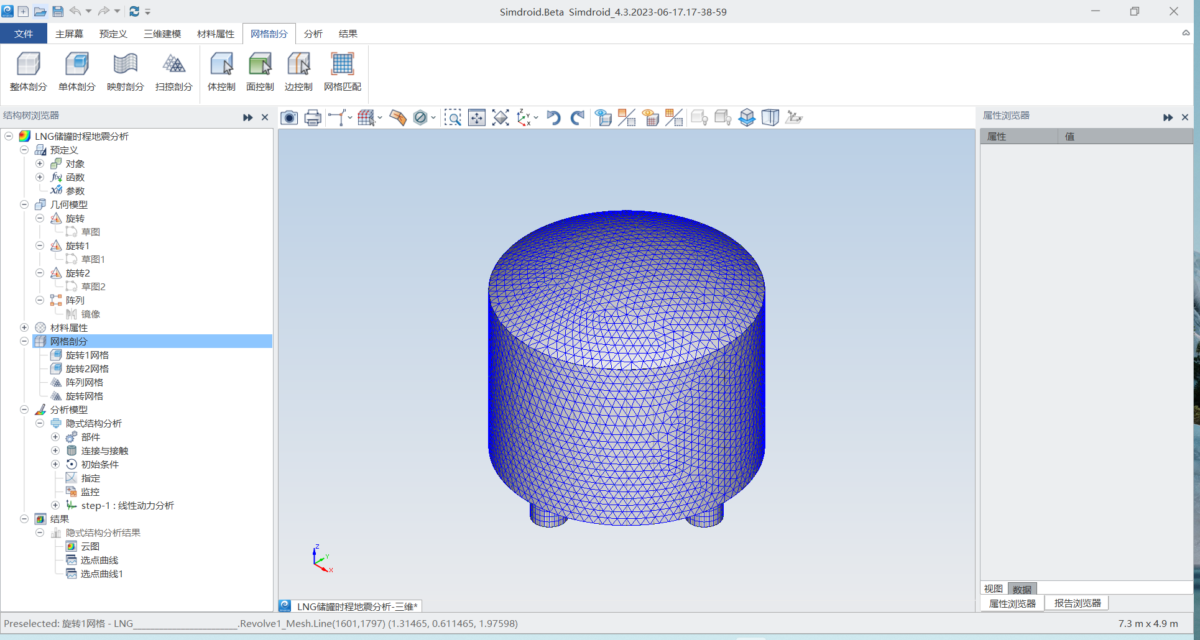
| 产品简介 | 伏图®(Simdroid®)是云道智造自主研发的通用多物理场仿真PaaS平台,历经十年打磨,已迭代至5.0版本,实现“工程可用”。伏图®(Simdroid®)提供固体力学、流体力学、电动力学、热力学等多种通用求解器,支持多物理场耦合仿真。在统一友好的环境中为仿真工作者提供丰富的前处理、求解分析和后处理工具。同时,作为仿真PaaS平台,其内置的APP开发器支持用户以无代码化的方式便捷封装全参数化仿真模型及仿真流程,将仿真知识、专家经验转化为可复用的仿真APP。 | 多物理场仿真及优化平台(简称 INTESIM-MultiSim)主要是面向工程中对单场及多场耦合仿真的实际需求,提供完整的核心求解器解决方案。平台在多场耦合分析技术方面具备世界领先的耦合方法体系,作为 INTESIM 公司的核心产品,能够帮助用户解决生产设计中的结构、流体、热、电磁、声学等物理场问题,同时能够实现上述物理场之间的耦合问题,包括流固(热)耦合、电磁 - 结构耦合、电磁 - 热耦合、电磁 - 结构 - 热耦合、电磁 - 结构 - 热 - 流体耦合、结构 - 振动噪声耦合等。并且通过通用弱耦合接口软件(简称 INTESIM-GISCI) 可实现第三方求解器耦合计算,满足不同行业用户对多场耦合分析的迫切需求。另外,刚柔耦合多体动力学软件(简称 INTESIM-FMBD)求解器也已纳入INTESIM-GISCI 通用弱耦合体系,可实现柔性体 - 流体双向耦合,与其他物理场的耦合分析能力也将逐步建设完善。同时,平台具备基于可靠度的寿命评估和优化模块,高性能计算模块等关键技术,可大幅减少企业用户的工作量、节省工时和提高工作效率。 | - | - |
| 制造商 | 北京云道智造科技有限公司 | 英特工程仿真技术(大连)有限公司 | - | - |
| 原产地 | 北京 | 辽宁 > 大连 | - | - |
| 授权方式 | 永久授权 订阅 | - | - | - |
| 发布时间 | 2024年 | 2024年 | - | - |
| 详情 | 查看详情 > | 查看详情 > | - | - |
|
||||
| 功能模块 | - | - | - | |
|
||||
| 价格 | - | - | - | - |
|
||||
| 界面 | - | - | - | |
|
||||
| 特点 | - | - | ||
|
||||
| 客户 | - | - | - | |
|
||||
| 供应商 | - | - | - | |


注:软件功能配置信息仅供参考,实际功能配置信息以真实软件为准,解释权归软件制造商所有。
 软服之家-企业软件选型与采购平台
软服之家-企业软件选型与采购平台 苏公网安备 32059002002276号
苏公网安备 32059002002276号