


Kineo碰撞检测器在网格表面(多面体)和点云数据上执行高速碰撞分析,以解决可能阻止组装成功制造或阻碍部件预期运动的碰撞。它的高性能使其理想的复杂运动仿真环境,如机器人仿真。
1、确定碰撞线、安全线、桥台线和交点线
2、测量相互渗透的深度
3、获取重定位信息以纠正冲突
4、监控部件之间的间隙(最小距离)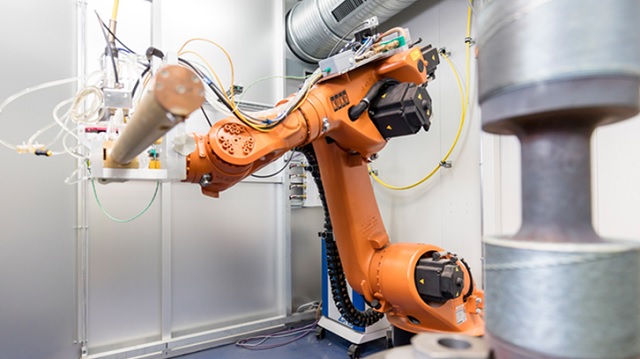
Kineo碰撞检测器在网格表面(多面体)和点云数据上执行高速碰撞分析,以解决可能阻止组装成功制造或阻碍部件预期运动的碰撞。它的高性能使其理想的复杂运动仿真环境,如机器人仿真。
1、确定碰撞线、安全线、桥台线和交点线
2、测量相互渗透的深度
3、获取重定位信息以纠正冲突
4、监控部件之间的间隙(最小距离)



 苏公网安备 32059002002276号. 增值电信业务经营许可证:苏B2-20211237
苏公网安备 32059002002276号. 增值电信业务经营许可证:苏B2-20211237


