



适用版本:Process Simulate V15
先将路径Cont_Robotic_Op添加Path Editor工具栏中;

图1
设置固定涂胶支架上的参考坐标系, 点击Path Editor中的 Set Location Properties;

图2
出现location的属性对话框,点击Remote Tcp这个选项;
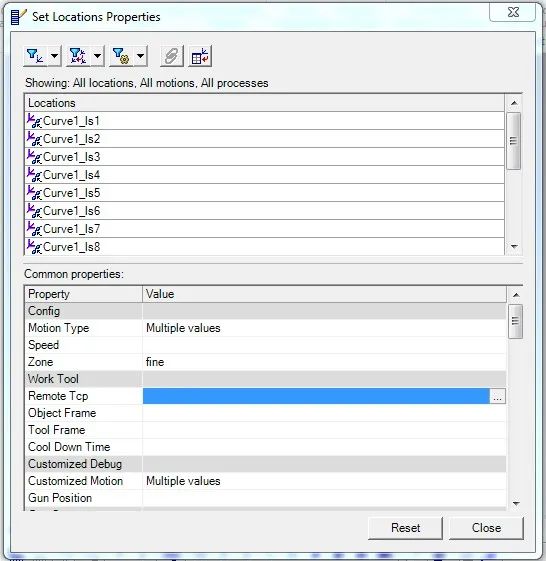
图3
出现Remote Tcp对话框, 然后选择固定涂胶支架上的坐标Frame;

图4
点击ok之后,在Set Location Properties对话框Remote Tcp一栏中的坐标定义为涂胶支架上的坐标;设置完单击close关闭对话框;

图5
选择路径中的第一个location后,在Robot工具栏下选择Jump Assigned Robot, 使机器人能够到达第一个坐标;

图6
出现对话框,显示机器人无法到达该位置;
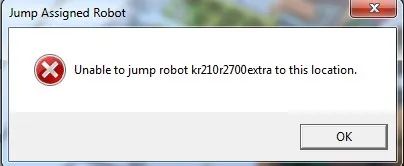
图7
使用Location Manipulator来调整机器的可达性位置。在选择第一个坐标, 在Operation–Location Manipulator;
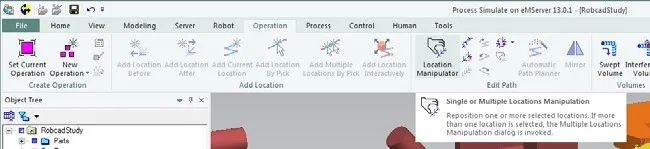
图8
出现涂胶点位置调整对话框, 在对话框中选择机器人Follow Mode, 使机器人跟随Location的位置变化而变化 ;
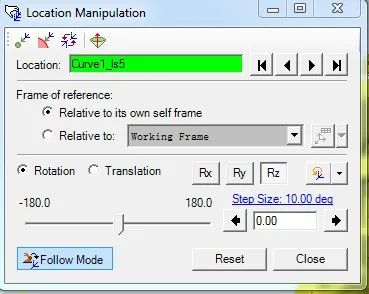
图9
拖曳坐标系改变位置, 是机器人调整到位置;

图10
依次调整整条路径中所有Location的位置, 完成路径优化。




 苏公网安备 32059002002276号
苏公网安备 32059002002276号